Entrenar una intel·ligència artificial per detectar tumors cerebrals sembla una cosa gairebé màgica, però en realitat és una feina molt metòdica. En aquest experiment hem comparat dos models de segmentació 3D sobre ressonàncies magnètiques del cervell: SegResNet i UNet3D. L’objectiu no era només “encertar” si hi ha tumor o no, sinó marcar a la imatge quina part correspon al tumor.
Per fer-ho hem treballat amb el dataset Task01_BrainTumour del Medical Segmentation Decathlon, basat en el conegut repte BraTS. Cada cas inclou quatre modalitats de ressonància magnètica: FLAIR, T1, T1 amb contrast i T2. En comptes d’entrar directament en la classificació detallada de subregions tumorals, hem simplificat el problema a una pregunta més directa i útil per a un primer model: tumor contra no tumor.
Què fan exactament aquests dos models?
UNet3D és el gran clàssic de la segmentació mèdica. Funciona com una xarxa que va comprimint la informació per entendre el context general i després la va reconstruint per recuperar el detall espacial. És una arquitectura molt utilitzada perquè és robusta, coneguda i relativament fàcil d’explicar.
SegResNet, en canvi, afegeix una altra idea: les connexions residuals. Dit simplement, ajuda el model a entrenar-se millor quan la xarxa es fa més profunda i a mantenir informació útil al llarg del recorregut. En problemes 3D mèdics, això pot donar més estabilitat i un millor equilibri entre context i detall.
Com s’ha entrenat el sistema?
El pipeline ha estat similar en tots dos casos per fer una comparació neta. Les imatges es descomprimeixen localment al Colab, es normalitzen, es reorienten i es retallen per centrar-se en el cervell. Després, en lloc d’entrenar amb el volum sencer, el model veu patches 3D de mida 128×128×128. Això permet treballar amb dades grans sense esgotar la memòria.
També s’han aplicat augmentacions senzilles però útils: girs, flips, petites variacions d’intensitat i soroll. A més, en la versió millorada del SegResNet s’ha afegit una cosa important: oversampling dels casos difícils. En lloc de mostrar tots els casos igual, el sistema dona més pes als tumors petits, als més fragmentats i als que combinen totes dues dificultats. Això és rellevant perquè justament aquí és on els models acostumen a fallar.
Resultats: qui ha guanyat?
El millor SegResNet va arribar a una mitjana de Dice d’aproximadament 0,895, amb una mediana de 0,923. El millor postprocessat va ser amb threshold 0,45 i eliminació de components menors de 100 vòxels.
La millor UNet3D, en canvi, es va quedar en una mitjana de Dice de 0,8866, amb una mediana de 0,910. El seu millor postprocessat va ser amb threshold 0,50 i el mateix límit de 100 vòxels.
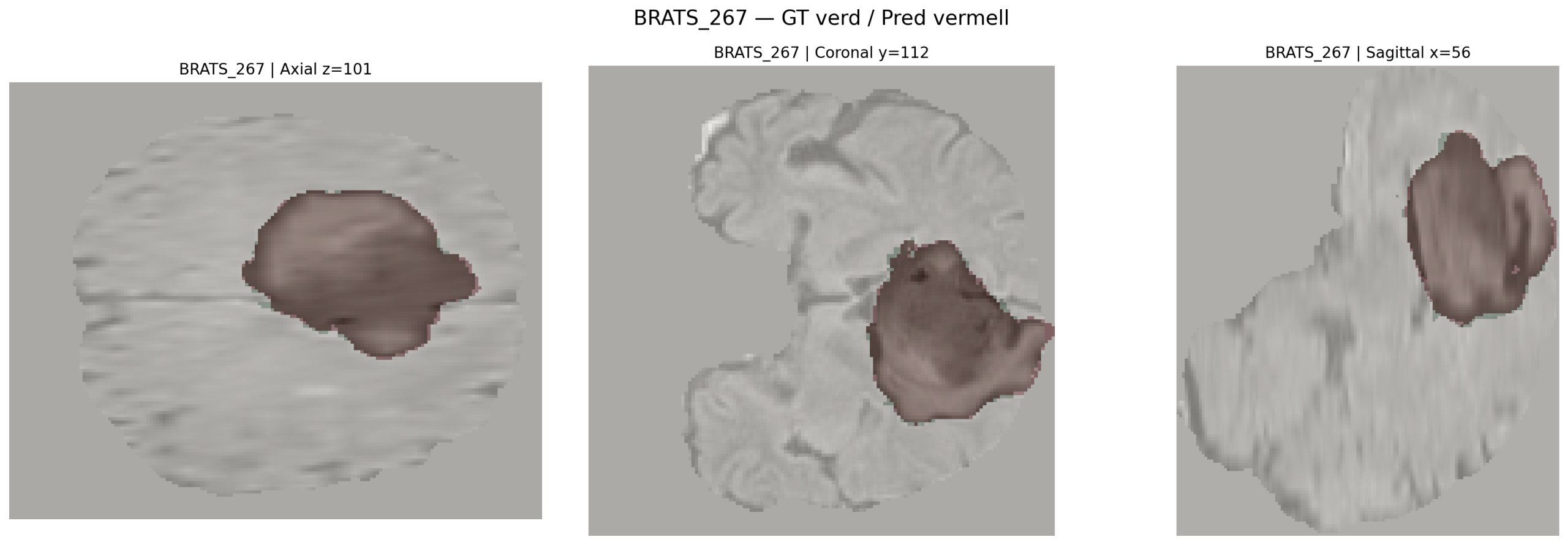
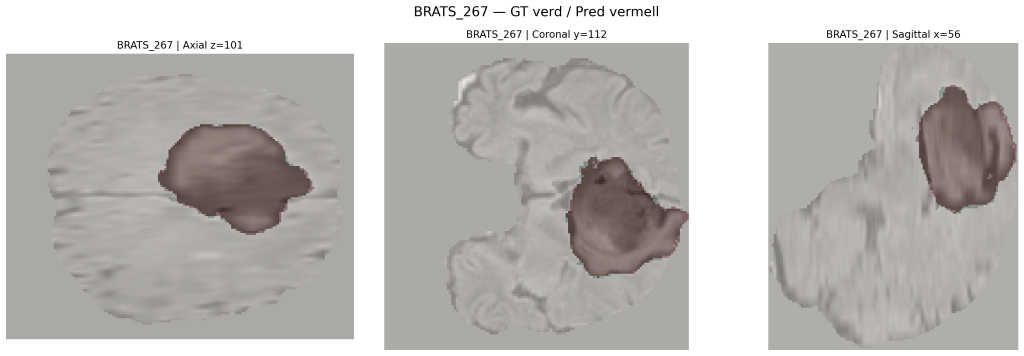
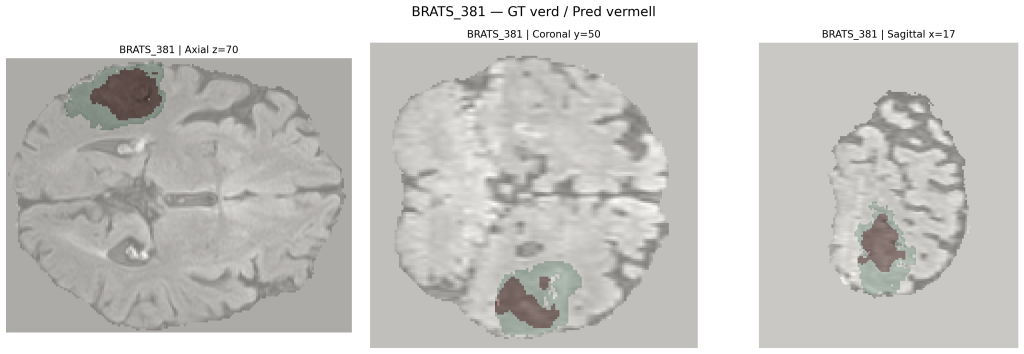
A primera vista la diferència no sembla enorme. Però en segmentació mèdica no n’hi ha prou amb mirar la mitjana. El punt clau són els casos difícils. I aquí és on SegResNet va sortir millor parat. La UNet3D va continuar patint especialment en alguns tumors complicats, com ara BRATS_381, que va quedar amb un Dice de només 0,513, o casos on la forma general del tumor era raonable però la localització fina i la cobertura encara fallaven.
Què ens diu això de debò?
La conclusió no és que UNet3D sigui “dolenta”. No ho és. De fet, continua sent una molt bona baseline i en molts casos funciona molt bé. Però en aquest experiment concret, amb aquest dataset i aquest pipeline, SegResNet ha estat superior.
La diferència més important no sembla venir només de l’arquitectura, sinó del conjunt complet: arquitectura, entrenament, mostreig i tractament dels casos difícils. En especial, l’oversampling real del train ha ajudat a reduir la cua de pitjors resultats, que era justament el gran problema del projecte.
El cas molt bo de la UNet3D (BRATS_267) i el cas dolent (BRATS_381), millor si és en format comparatiu o amb GIF/PNG resum. Això ajuda molt a fer visible que una mitjana bona pot amagar casos difícils.
Conclusió final
Si l’objectiu és construir un sistema robust per detectar tumor cerebral en 3D, SegResNet és ara mateix l’opció guanyadora d’aquest projecte. No perquè sigui perfecta, sinó perquè ha rendit millor tant globalment com en la majoria dels casos difícils. La UNet3D continua sent una comparativa útil, però no ha aconseguit destronar-la. El pròxim pas ja no és provar models per provar-los: és entendre encara millor els casos que continuen fallant i veure fins on es pot afinar el sistema sense complicar-lo inútilment.